
Revisiting DeepLearning: DenseNet, MobileNet, EfficientNet
From feature reuse to efficiency-driven design

In the previous post, I explored how AlexNet popularized deep CNNs and how ResNet solved the vanishing gradient problem using residual connection. However, depth alone was not the end and in this blog will focus on architectures which introduced different kind of efficiency strategies.
DenseNet, MobileNet, EfficientNet each rethink CNN design by optimizing different aspect of efficiency.
DenseNet → efficiency via feature reuse
MobileNet → efficiency via computation reduction
EfficientNet → efficiency via systematic scaling
I will focus on the Image Classification task in this blog.
Code can be found at: GitHub Link
DenseNet
DenseNet(Densely Connected Convolutional Network) changed how neural network layers communicate. Instead of each layer only receiving input from the previous layer, every layer has direct access to all previous feature maps. This dense connectivity allows information and gradients to flow easily throughout the network.
DenseBlock concept
For a dense block:
Operation Sequence: Each layer applies ReLU, then 2D convolution, and then concatenates the output to previous features.
Mathematically:
xl = Hl([x0,x1, …, xl-1])
where Hl(.) is the convolution and activation operations.
Padding to preserve Spatial Dimensions
padding = (k - 1) / 2, where k is the kernel size
Dense Block Growth
Each layer within a Dense Block produces ‘growth_rate’ feature maps.
After L layers, total_channels = input_channels + L * growth_rate
growth_rate: critical hyperparameter as this controlled growth keeps the network relatively parameter-efficient.
For example, as being observed from Fig.1, for L layers, there are L*(L + 1) / 2 direct connections. For each layer, feature maps of all preceding layers are used as input and its own feature map used in all subsequent layers. That’s it.
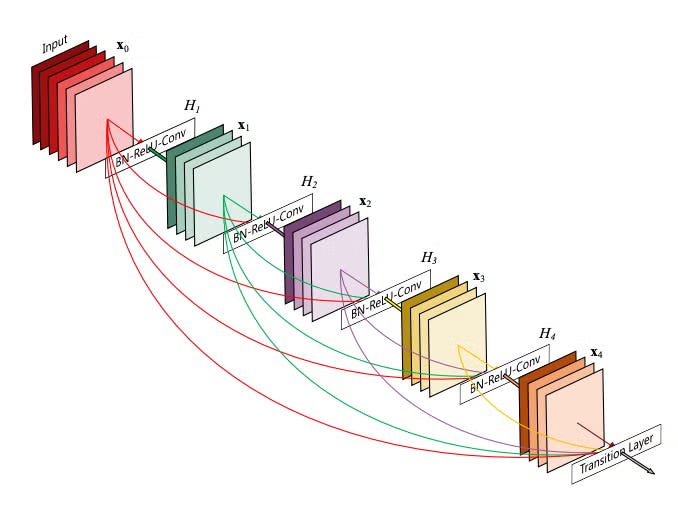
Defining Design choice: feature concatenation instead of summation, unlike in ResNet where layers are connected via additive skip connections. DenseNet preserves feature maps explicitly, avoiding information loss and enabling effective feature reuse.
Key Characteristics:
Alleviate vanishing gradient problem through multiple short gradient paths
Strengthen feature propagation across layers
Encourage feature reuse, reducing redundancy
Parameter reduction: eliminates the need to learn redundant features
While DenseNet improved parameter efficiency and gradient flow, its memory cost made it less suitable for resource-constrained environments.
MobileNet
For many real-world applications, however, the primary constraint is not training stability or parameter count, but computational cost and inference latency.
MobileNet was introduced to address this challenge. MobileNet redesigns the convolution operation itself to drastically reduce computation.
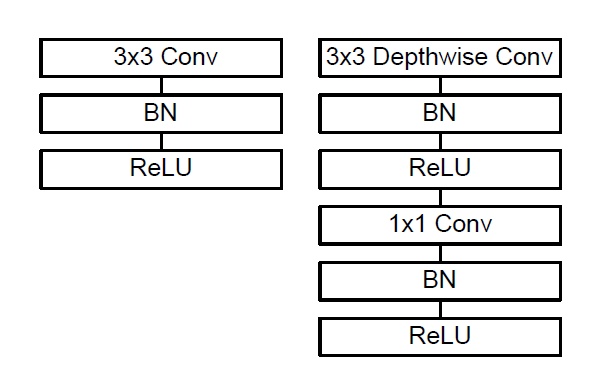
DepthWise Separable Convolution
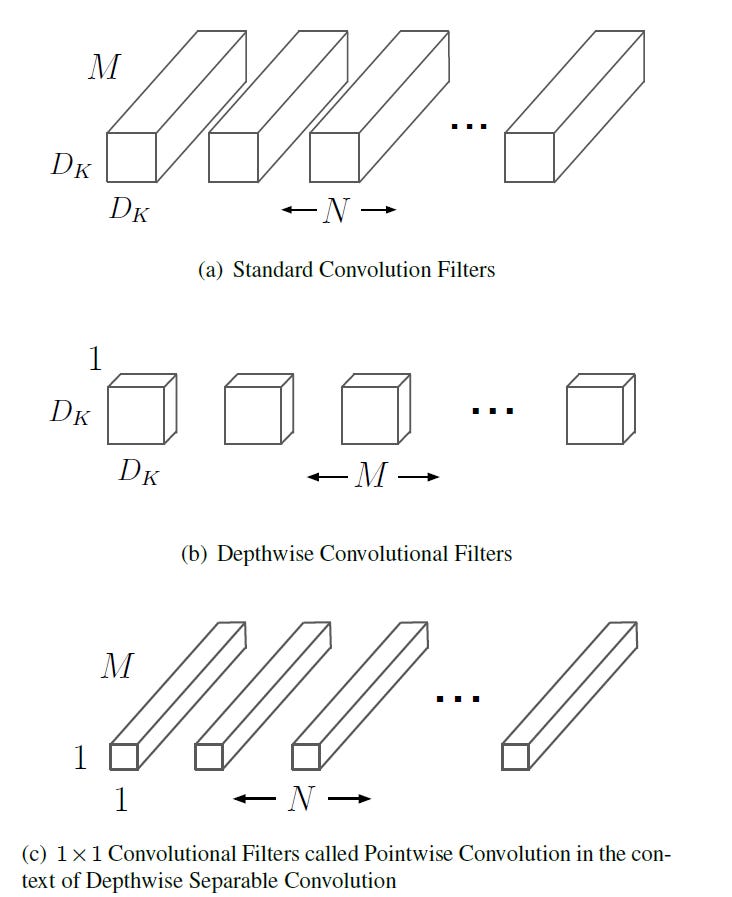
Core idea is to factorize a standard convolution into two operations:
Depthwise Convolution: applies a single convolutional filter to each input channel independently.
Poistwise Convolution(1x1): combines the outputs across channels
Consider an input feature map F of shape DF x DF x M where:
DF : spatial resolution (height and width)
M : number of input channels
Goal: Produce an output feature map G of shape DG x DG x N, where:
N: number of output channels
Standard Convolution
In a standard convolutional layer, using kernel of size DK x DK x M x N
Each output channel is computed by convolving across all input channels, tightly coupling spatial filtering and channel mixing.
Total Computational Cost = DK . DK . M . N . DF . DF
Depthwise Separable Convolution
Depthwise Convolution
Applies one filter DK x DK per input channel
No mixing across channels
Computational cost = DK . DK . M . DF . DF
Pointwise Convolution (1x1)
Uses 1 x 1 convolutions to combine channel information
Maps M input channels to N output channels
Computational cost = M . N . DF . DF
Total computational cost = DK . DK . M . DF . DF + M . N . DF . DF
Net reduction = (1 / N) + (1 / D2K )
For typical values(DK = 3, large N):
Computation reduce 8-9x
Accuracy degradation is relatively small
Width and Resolution Multipliers
MobileNet introduces two simple hyperparameters to control the trade-off between accuracy and efficiency:
Width multiplier (α): scales the number of channels in each layer
Resolution multiplier (ρ): scales the input image resolution
The above two hyperparameters can be adjusted to different hardware and latency constraints without redesigning the architecture.
Key Characteristics
Drastically reduced computation via depthwise separable convolutions
Lightweight architecture suitable for mobile and embedded devices
Flexible accuracy–latency trade-off through width and resolution scaling
Fast inference under tight resource constraints
Subsequent versions of MobileNet refined this lightweight design without changing its core principle(Detailed discussion is beyond the scope of this blog)
MobileNetV2 introduced inverted residual blocks with linear bottlenecks to improve information flow and training stability
MobileNetV3 incorporated lightweight attention mechanisms, hardware-friendly activations, and neural architecture search to further optimize accuracy–latency trade-offs.
While MobileNet and the subsequent variants focused on optimizing models for resource-constrained systems, the question of how to systematically scale networks across different compute regimes needs to be explored.
EfficientNet
Increasing model capacity is a common way to improve accuracy, but naïvely scaling a network by only increasing depth, width, or input resolution often leads to diminishing returns.
EfficientNet introduces a systematic scaling strategy, called compound scaling, which jointly scales network depth, width, and resolution in a balanced manner. EfficientNets are designed to get better accuracy with far fewer parameters and FLOPs than prior models (ResNet, DenseNet, etc.).
Core Idea: Compound Scaling
Instead of scaling only depth or width or resolution, EfficientNet scales all three together in a principled way.
Let:
depth = d, width = w, resolution = r
Before EfficientNets
Only increase depth
Add more layers
Problems: vanishing gradients, diminishing returns
E.g.: ResNet-1000 has similar accuracy as ResNet-101 even though it has much more layers.
Only increase width
Add more channels
Problems: memory-heavy, inefficient use of FLOPs
Only increase resolution
Use bigger images
Problems: computation explodes
Scaling up any dimension of network width, depth, or resolution improves accuracy, but the accuracy gain diminishes for bigger models.
Depth, width, and resolution should be scaled together, not independently.
Scaling rule:
subject to:
ϕ: user-defined scaling coefficient (how big the model is)
α,β,γ: constants found by grid search on a base model
Note: Resolution scaling is applied during data preprocessing (input resizing), not inside the network.
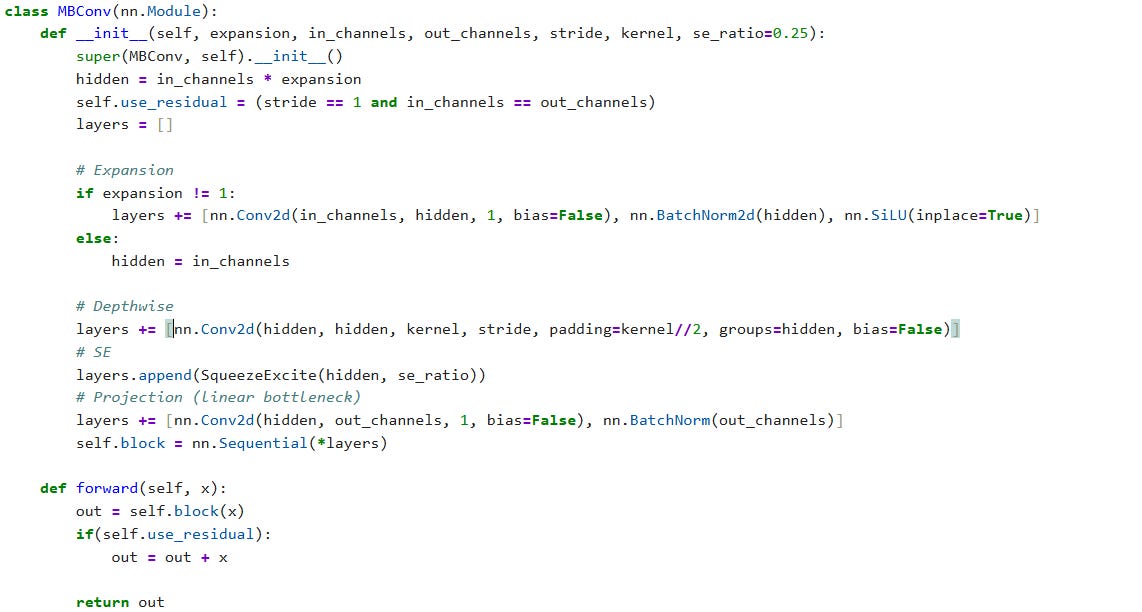
Building Block: MBConv
An MBConv block combines three ideas:
Inverted residual block (from MobileNetV2)
Depthwise separable convolution
Squeeze-and-Excitation (SE) attention (from MobileNetV3)
Structure
1×1 expansion conv (increase channels)
Depthwise 3×3 or 5×5 conv
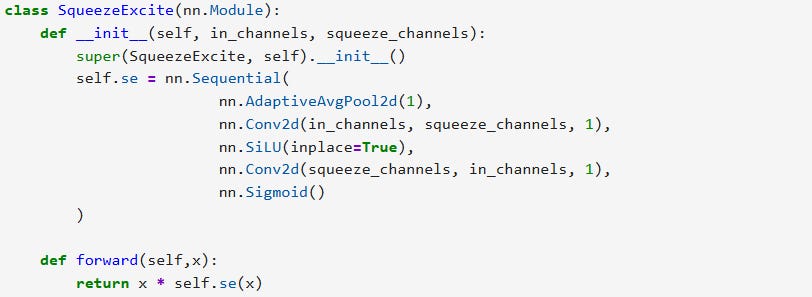
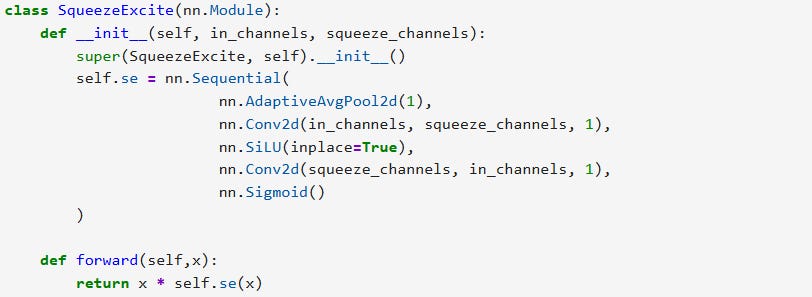
Squeeze-and-Excitation (SE)
Channel-wise attention:
Global Avg Pool → FC → FC → sigmoid
Reweights channels adaptively
1×1 projection conv
Skip connection (if stride = 1)
From [3], Starting from Baseline EfficientNet-B0, compound scaling method to scale up is as follows
Fix ϕ = 1, Best values for the baseline, α = 1.2, β = 1.1 , γ = 1.15
Now fix α, β, γ as constants and scale up the baseline network with different ϕ using the equation mentioned before, to obtain EfficientNet-B1 to B7

Practical Insights
Parameter counts are highly sensitive to architectural details
Although EfficientNet-B0 is commonly reported to have ~5.3M parameters, small implementation choices can easily shift this number by millions
Squeeze-and-Excitation bottleneck sizing is critical
common mistake: computing the SE bottleneck from the expanded channel dimension of MBConv blocks.
In EfficientNet, the SE bottleneck is instead computed from the input channels of the block, even though SE is applied to the expanded feature map.
Formally:
Expanded channels = Cin × t
SE bottleneck = Cin // 4
Bias terms in SE layers affect parameter count. Torchvision’s EfficientNet includes bias terms in SE convolutions. Removing these biases reduces parameter count but creates a leaner variant rather than an exact reproduction of the reference implementation.
Closing Thoughts
DenseNet, MobileNet, and EfficientNet approach efficiency from very different directions—feature reuse, computation reduction, and principled scaling. Small deviations in block configuration or scaling logic can significantly impact parameter count and performance.
In particular, EfficientNet demonstrates that architectural discipline matters as much as architectural novelty. Subtle details such as squeeze-and-excitation bottleneck sizing, head width, and normalization placement can change parameter counts by millions and significantly alter efficiency.
References
[1] Densely Connected Convolutional Networks
[2] MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications
[3] EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks
[4] MobileNetV2: Inverted Residuals and Linear Bottlenecks
[6] Squeeze-and-Excitation Networks