WorkLog: Reduction in CUDA

In this post, I’ll explore various methods to optimize Reductions in CUDA, mainly focus on Sum Reduction.
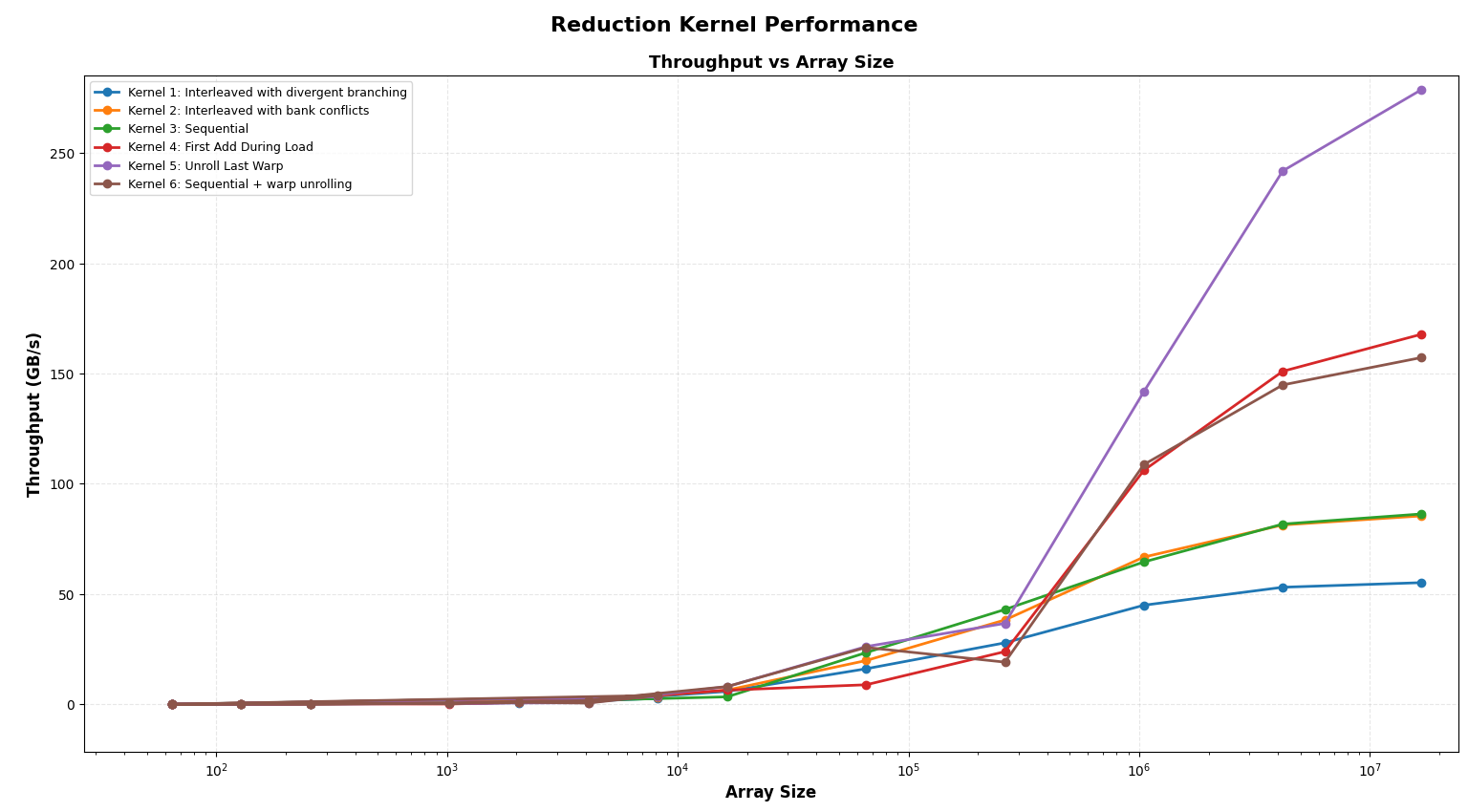
GPU Used: RTX3060
Code can be found at: Reduction in CUDA
Background
Reductions in programming refer to a pattern where we take multiple input values in order to get a single output using some operations.
Typical Reduction operations:
Sum of all elements
Minimum/Maximum
Logical AND/OR etc.
Why Reductions are tricky in CUDA?
Serialization Problem
A classical, single-threaded CPU reduction in a simple loop:
int sum = 0;
for (int i = 0; i < N; i++) {
sum += array[i]; // fundamentally sequential!
}This loop is fundamentally sequential: each iteration depends on the previous one.
On a GPU, however:
Thousands of threads run concurrently
Cannot all update the same variable (race condition)
CUDA has no hardware mechanism to synchronize all blocks at once while a kernel is running
Coordination Problem
GPUs have a hierarchical execution model:
Intra-block communication
Threads can:
Communicate using shared memory
Synchronize using __syncthreads()
This makes intra-block reduction efficient.
Inter-block communication
There is no built-in synchronization inside a single kernel. So combining partial results from different blocks is tricky.
There are largely two ways of approaching them, both with their pros and cons.
Global Memory + Multiple Kernel Launches
Atomic Operations to Global Memory
Memory Bandwidth Problem
A reduction has very low arithmetic intensity (AI):
FLOPs ≈ N
Bytes read ≈ 4N (for float)
AI ≈ 1 FLOP per 4 bytes → extremely low
This means the reduction is memory-bound, not compute-bound. So, GPU cores sit idle because reduction is limited by memory bandwidth, not compute throughput.
Kernel 1: Interleaved Addressing(Naive method)
__global__ void reduction(const float* input, float* output, int N){
extern __shared__ float sOut[];
int tid = threadIdx.x;
int gid = blockDim.x * blockIdx.x + threadIdx.x;
sOut[tid] = (gid < N) ? input[gid] : 0.0f;
__syncthreads();
for(int i = 1;i < blockDim.x;i<<=1){
if(tid % (2*i) == 0){
sOut[tid] += sOut[tid + i];
}
__syncthreads();
}
if(tid == 0){
output[blockIdx.x] = sOut[0];
}
}Issues with the above approach:
modulo(%) operator is slow.
Highly divergent and warps are very inefficient
Inside a warp(32 threads), the condition
if(tid % (2*i)==0)
activates only some threads based on modulus patterns
Example with i = 1:
Threads 0,2,4,6,… do work
Threads 1,3,5,7,… do nothing
This means exactly half the threads in every warp take the “true” branch and half take the “false” branch.
classic warp divergence.
Possible out-of-bounds read: When
tid + i >= blockDim.x, this will illegally read shared memory.
Kernel 2: Interleaved Addressing v2
Improvements over Kernel 1:
Only 1 thread per pair performs work → no divergence pattern.
No out-of-bounds because index + i < blockDim.x is guaranteed whenever index < blockDim.x.
__global__ void reduction(const float* input, float* output, int N){
extern __shared__ float sOut[];
int tid = threadIdx.x;
int gid = blockDim.x * blockIdx.x + threadIdx.x;
sOut[tid] = (gid < N) ? input[gid] : 0.0f;
__syncthreads();
for(int i = 1;i < blockDim.x;i *= 2){
int index = 2 * i * tid;
if(index < blockDim.x){
sOut[index] += sOut[index + i];
}
__syncthreads();
}
if(tid == 0){
output[blockIdx.x] = sOut[0];
}
}Issues with the above approach:
Shared Memory bank conflict
occur when multiple threads attempt to access data from the same memory bank simultaneously.
These bank conflicts lead to serialization of what could otherwise be parallel memory accesses.
Kernel 3: Sequential Addressing
Advantages over the previous kernels:
Better memory access pattern
Threads in a warp access consecutive elements for
sout[tid]andsout[tid + i]Less bank conflict in shared memory
__global__ void reduction(const float* input, float* output, int N){
extern __shared__ float sout[];
int tid = threadIdx.x;
int gid = blockDim.x * blockIdx.x + threadIdx.x;
// Load data into shared memory
if(gid < N){
sout[tid] = input[gid];
}
else{
sout[tid] = 0.0f;
}
__syncthreads();
// Parallel reduction within block
for (int i = blockDim.x / 2; i > 0; i >>= 1) {
if (tid < i) {
sout[tid] += sout[tid + i];
}
__syncthreads();
}
// Write block result to global memory
if(tid == 0){
output[blockIdx.x] = sout[0];
}
}Issues:
Warp underutilization
Kernel 4: First add during global load
Advantages:
Fewer threads per block needed
Each thread handles two elements, so the active thread count for reduction is halved.
Better global memory efficiency
Each thread reads two consecutive elements → better coalesced memory access.
Fewer threads → less shared-memory overhead.
__global__ void reduction(const float* input, float* output, int N){
extern __shared__ float sOut[];
int tid = threadIdx.x;
int gid = 2 * blockDim.x * blockIdx.x + threadIdx.x;
// Load two elements per thread if within bounds
sOut[tid] = (gid < N ? input[gid] : 0.0f)
+ (gid + blockDim.x < N ? input[gid + blockDim.x] : 0.0f);
__syncthreads();
for(int i = blockDim.x / 2;i > 0;i >>=1){
if(tid < i){
sOut[tid] += sOut[tid + i];
}
__syncthreads();
}
if(tid == 0){
output[blockIdx.x] = sOut[0];
}
}Kernel 5: Unroll the last warp(Warp Optimization)
Advantages:
Eliminates unnecessary synchronization for last warp
Synchronization is costly; skipping it reduces latency.
Accessing shared memory in a warp does not require synchronization.
volatile float*ensures the compiler doesn’t cachesdata[tid]in a register, so each read sees updated shared memory values.
__device__ void warpReduce(volatile float* sdata, int tid) {
sdata[tid] += sdata[tid + 32];
sdata[tid] += sdata[tid + 16];
sdata[tid] += sdata[tid + 8];
sdata[tid] += sdata[tid + 4];
sdata[tid] += sdata[tid + 2];
sdata[tid] += sdata[tid + 1];
}
__global__ void reduction(const float* input, float* output, int N){
extern __shared__ float sOut[];
int tid = threadIdx.x;
int gid = blockDim.x * blockIdx.x + threadIdx.x;
sOut[tid] = (gid < N) ? input[gid] : 0.0f;
__syncthreads();
for(int i = blockDim.x / 2;i > 32;i >>=1){
if(tid < i){
sOut[tid] += sOut[tid + i];
}
__syncthreads();
}
if(tid < 32){
warpReduce(sOut,tid);
}
if(tid == 0){
output[blockIdx.x] = sOut[0];
}
}
Kernel 6: Sequential Addressing with warp-level Optimization
Advantages over Kernel 3:
Utilizes warps which reduces thread synchronizations thus improving performance.
__global__ void reduction_6(const float* input, float* output, int N){
extern __shared__ float sout[];
int tid = threadIdx.x;
int gid = blockDim.x * blockIdx.x + threadIdx.x;
// Load data into shared memory
if(gid < N){
sout[tid] = input[gid];
}
else{
sout[tid] = 0.0f;
}
__syncthreads();
// Parallel reduction within block
for (int i = blockDim.x / 2; i > 32; i >>= 1) {
if (tid < i) {
sout[tid] += sout[tid + i];
}
__syncthreads();
}
if(tid < 32){
warpReduce(sout,tid);
}
// Write block result to global memory
if(tid == 0){
output[blockIdx.x] = sout[0];
}
}Benchmarking Results